



















近期,开元获批海南省重点研发项目,将与中电科海洋信息技术研究院、中国科学院半导体研究所、海南大学共同完成水上水下一体化无人智能观测平台的开发工作。
填补技术空白
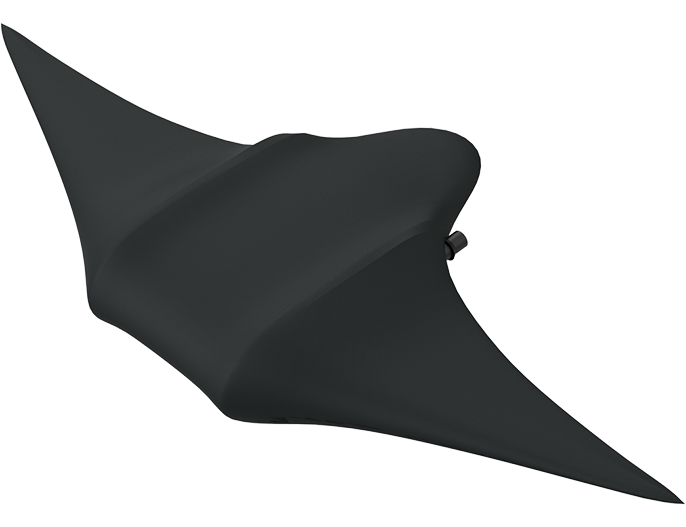
融合水面无人艇(USV)与水下无人潜航器(UUV)的一体化装备是海洋无人装备研究的前沿与热门技术。
自 20 世纪 70 年代起,为解决水下无人潜航器回收的问题,国外研制出了适合于船体挂载的回收装置,如日本东京大学的落座式水下固定回收装置,佛罗里达大西洋大学的绳类回收装置,美国伍兹霍尔海洋研究院的锥形导向罩回收装置。这些装置虽能达到水下回收的目的,但都存在不同的问题。
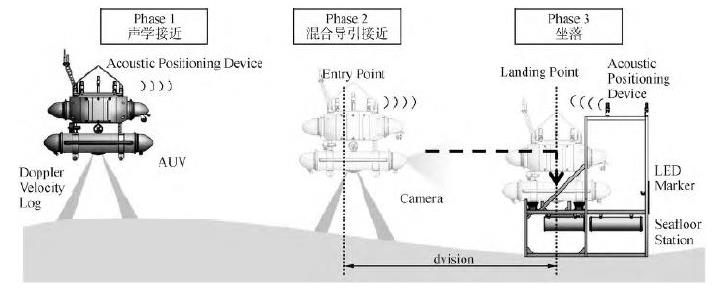
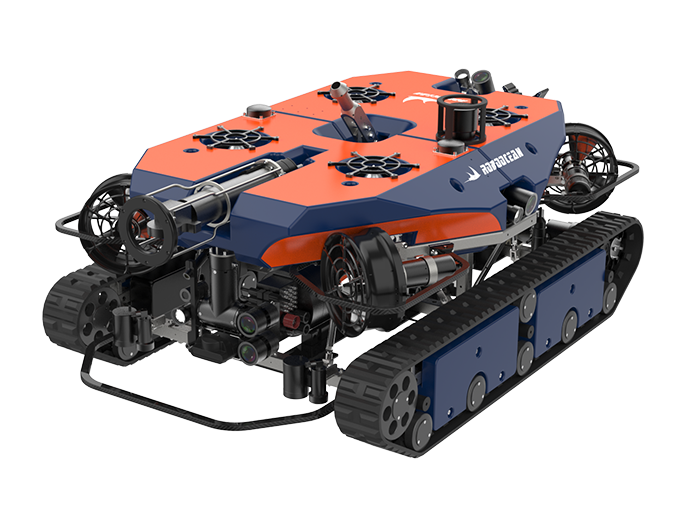
ri-TON2 坐落式回收系统
我国海洋技术经过几十年几代人的奋斗,正在飞速发展,水上水下设备都能够独立完成多种任务。但将二者结合的技术领域还处于发展的初期阶段。关于水面无人艇与水下无人潜航器的协同技术与自主回收技术的研究相对较少,尤其对于可挂载于无人艇的水下无人潜航器自主布放回收装置尚无样机产生。无人化、智能化、自主化、隐蔽化是海洋智能装备的发展趋势,研究水上水下一体化协同技术迫在眉睫。
解决现有问题
水上水下整体化的设计可以解决现存的几项问题。一是受环境影响大,海上环境复杂多变,而现阶段无人潜航器的布放和回收方式都对天气海况有一定的要求,能否完成任务需要“看天行事”。
二是布放回收系统成本高昂、隐蔽性差,现在主要的作业方式是母船航行到指定位置后再用起吊机进行相关工作,整套系统结构复杂,体积大,成本高,容易被发现。
三是人员参与度高,如前文所述,海上环境复杂危险,布放回收等工作需要作业人员在母船上进行操作,遇到恶劣天气,很有可能危及人身安全。

海上情况瞬息万变
三个环节齐发展
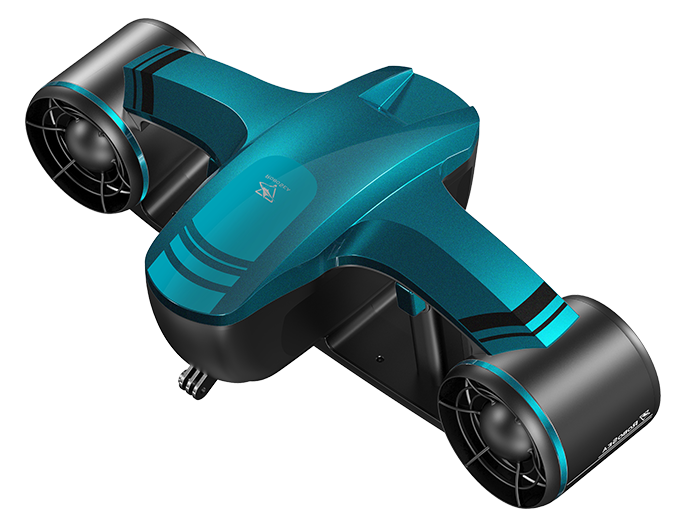
研究项目主要分为三个课题,第一个子课题聚焦水上部分,进行水面无人艇的设计研发,实现高精度航行;第二个子课题关注水下,进行水下观测平台的开发,优化水下无人潜航器使其能够与水面平台相互配合;第三个子课题结合水上水下,进行全自主水上水下一体化协同作业平台的开发。
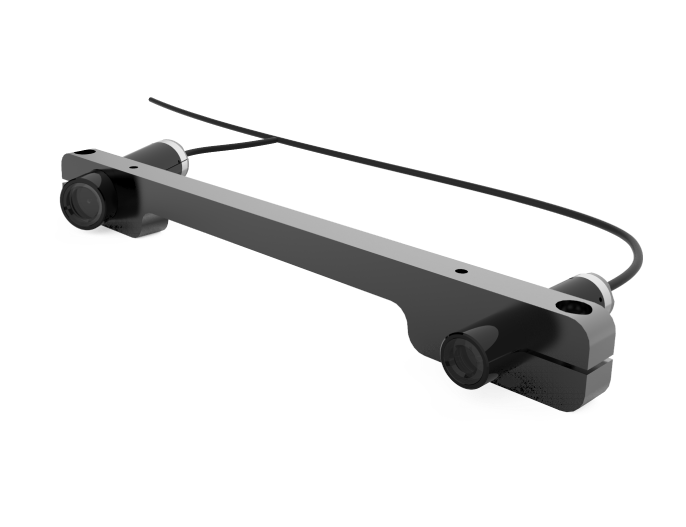
开元发挥自身优势与技术积累,将负责水下部分的研究工作,包括结构、控制算法的设计优化,水声定位、路径规划、目标定位标记技术研究等内容,除此之外也将协助水上水下协同作业的部分工作。
预期成果
本项目成果主要分为实体和系统两个部分。实体部分针对水面无人艇、水下无人潜航器进行结构优化,重点突破挂载式水下无人潜航器自动收放装置技术,并进行样机研制,实现水下无人潜航器挂载水面无人艇功能,组成一体化全自主样机;系统部分针对水面无人艇、水下无人潜航器与自动收放装置,组建开发数据通讯系统与综合控制系统,实现对整套系统样机的远程任务部署与监控。最终通过海洋环境测试,在拟定的应用场景内,对样机系统的性能指标、使用功能和应用能力进行实测,完成项目成果评估。
研制出的产品可以广泛应用在海洋工程、测绘勘探、海洋牧场、巡逻执法、环保监测等多个领域。在极大降低成本的同时,可以创造良好的经济价值。
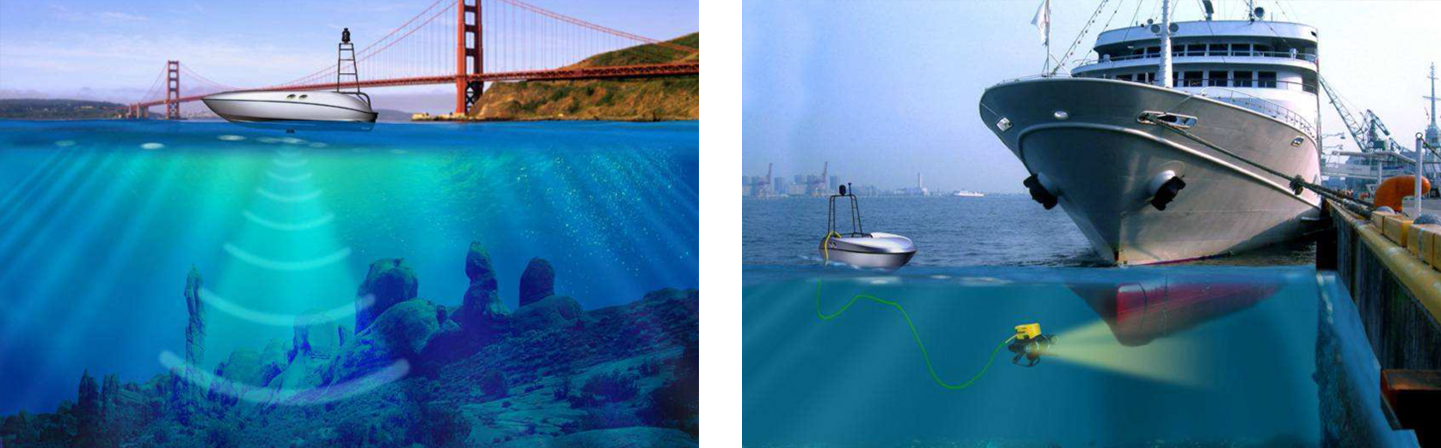
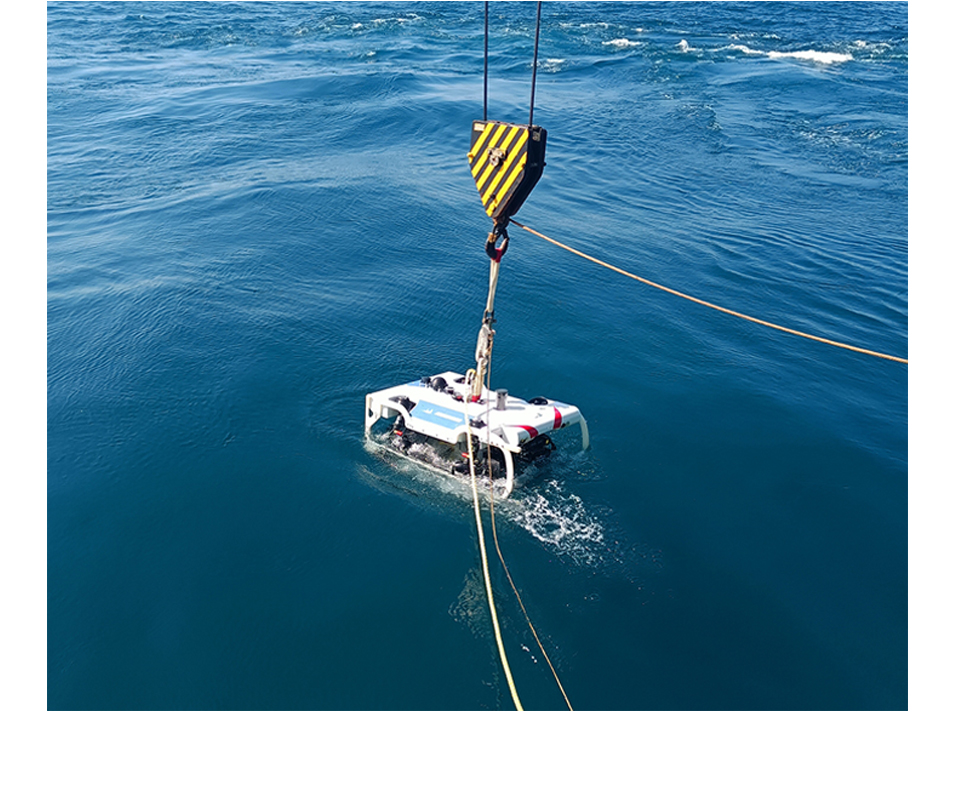
试验示范示意图
“十四五”规划中提出,要增强海洋科技创新能力,聚焦深海科技,以搭建海洋科技创新平台为重点,汇聚全球海洋创新要素,强化海洋重大关键技术创新,促进海洋科技成果转化,建立开放协同高效的现代海洋科技创新体系,着力打造深海科技创新中心,增强海洋科技创新驱动力。
水上水下一体化智能装备是海洋无人装备研究是实现装备安全持续作业的关键技术之一,是协同高效的现代海洋科技创新体系建设的方向之一。因此,研究水面无人艇与水下无人潜航器的一体化结合、构建海洋无人智能协同观测平台具有重要意义。
开元棋牌产品
联系开元



